Master's Thesis Project
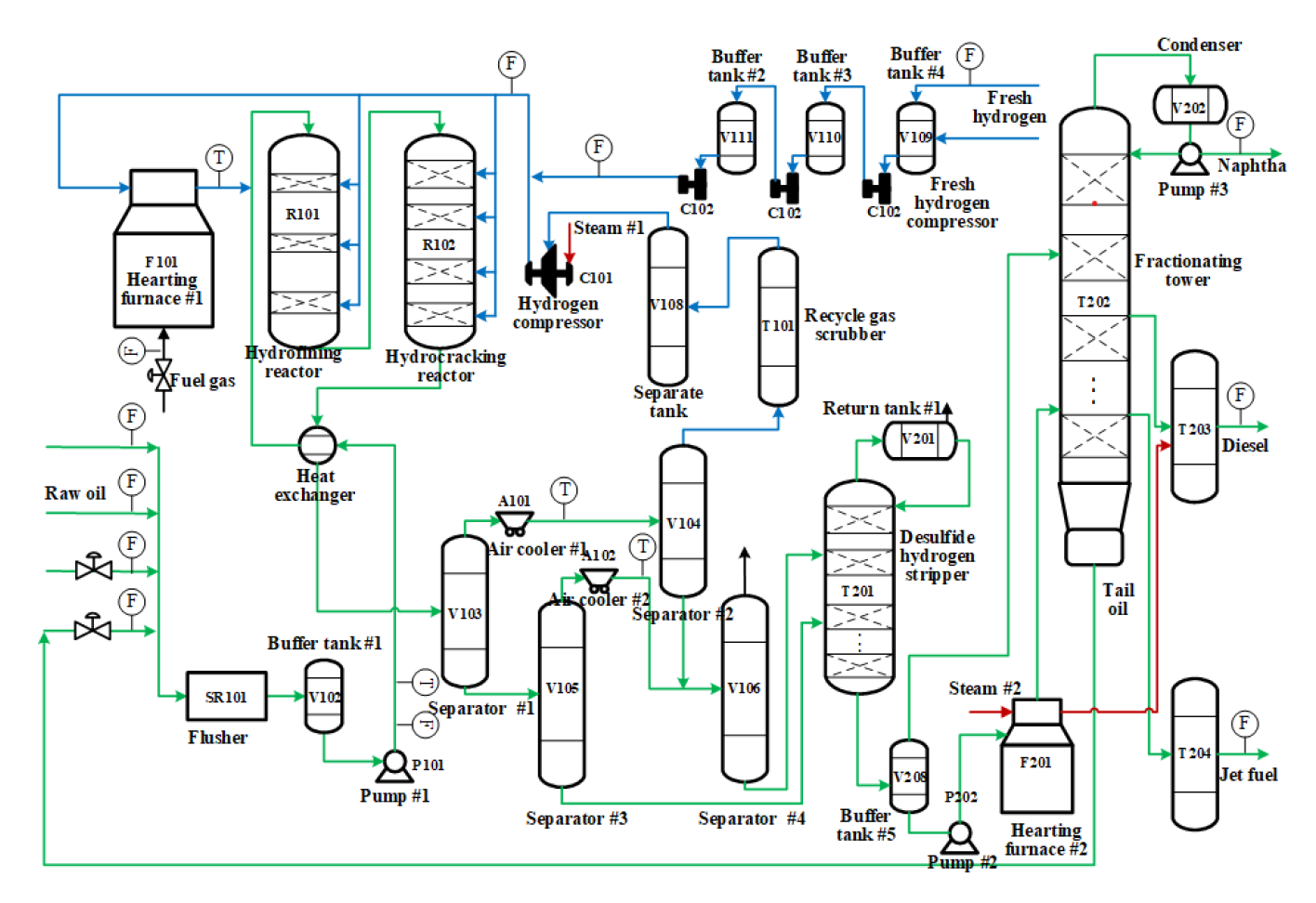
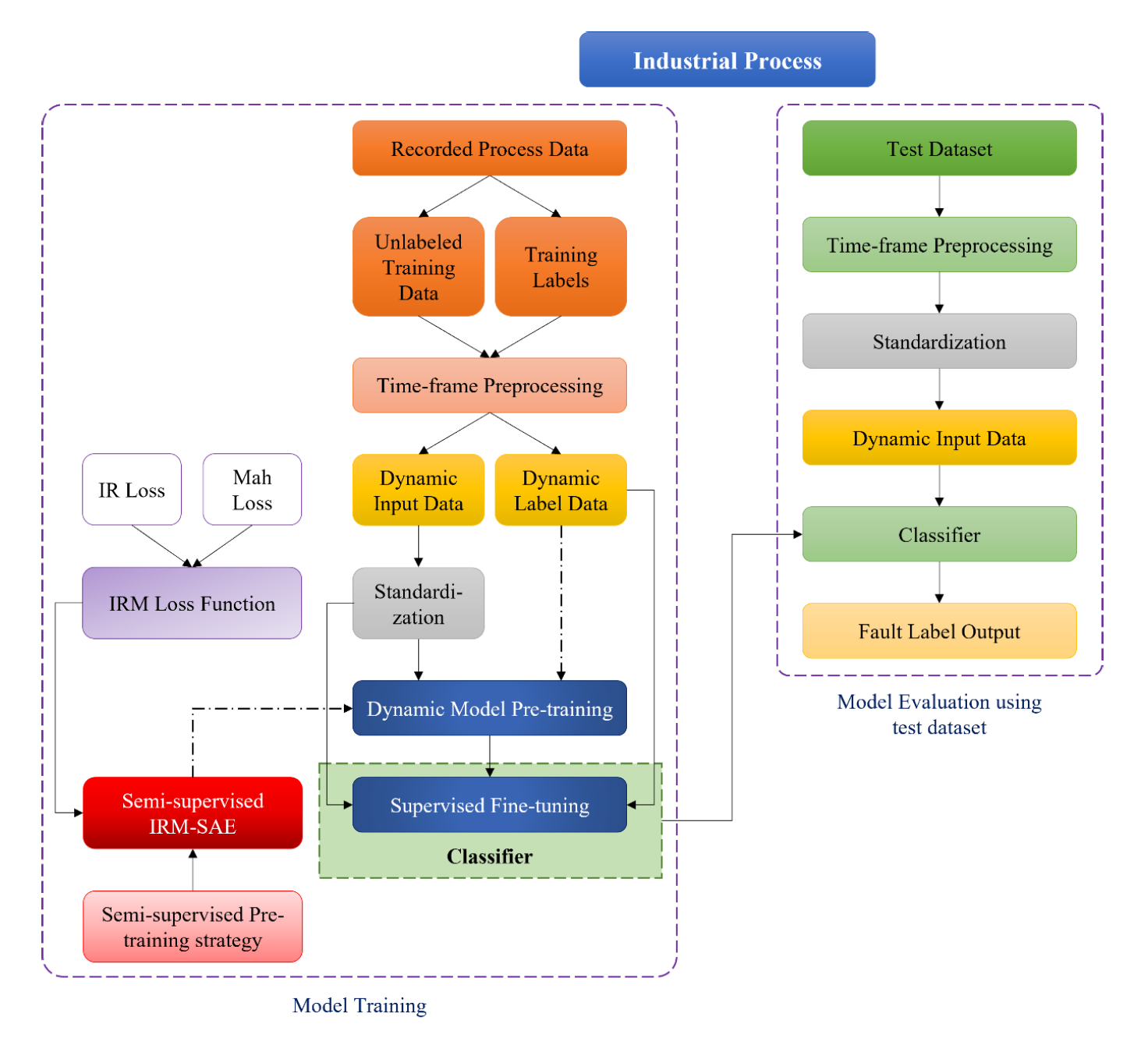
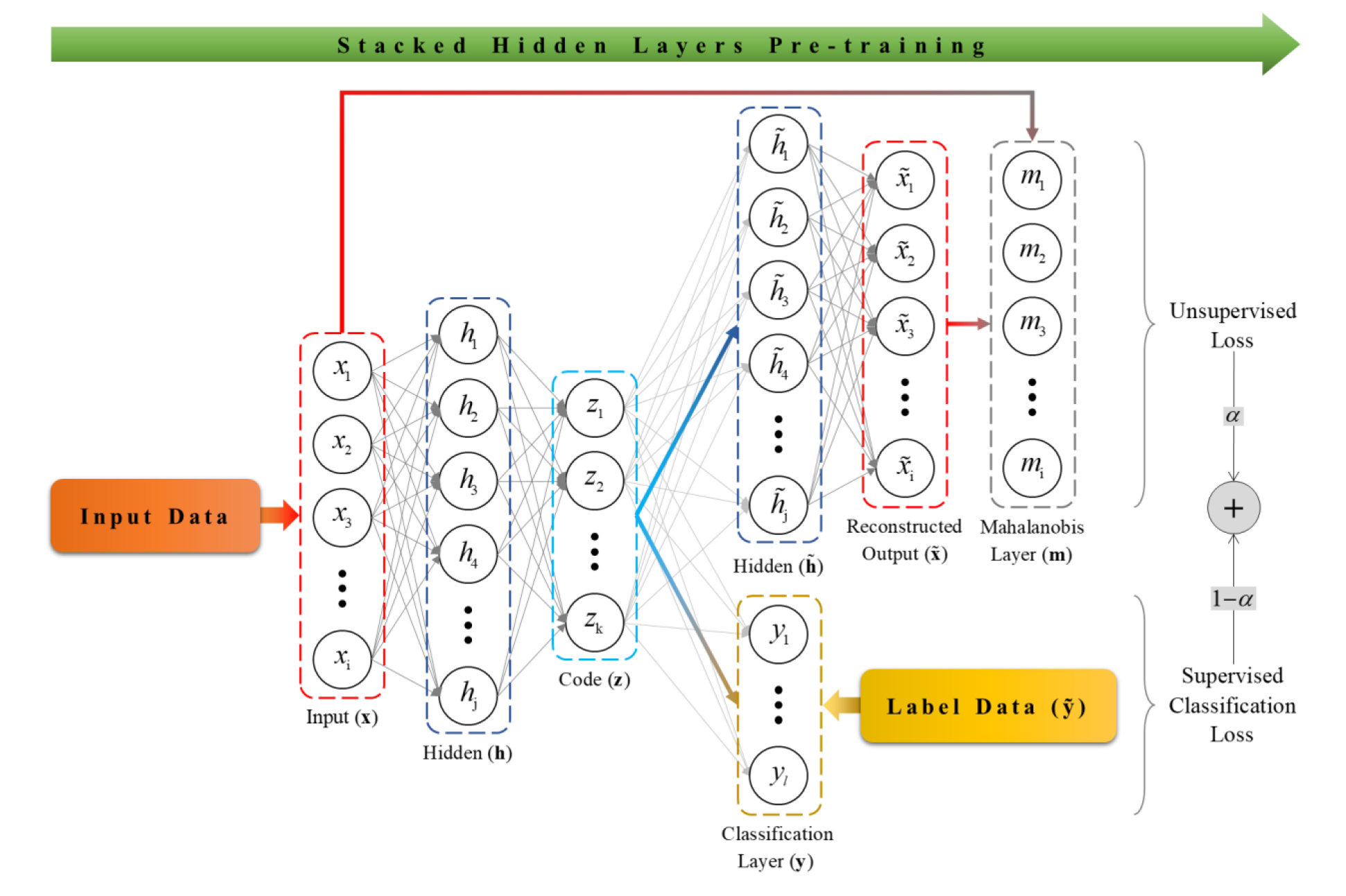
This research was related to deep fault-feature extraction from high-dimensional industrial process data for fault classification based on a novel stacked autoencoder (SAE) deep-learning model. Two industrial process datasets were used: (i) Tennessee Eastman benchmark process data and (ii) data from a real-world industrial hydrocracking process. The designed methods enhanced the feature learning capability of the traditional SAE by introducing a multi-objective loss function and using a semi-supervised pre-training strategy.
Published paper: View article (DOI: 10.1016/j.chemolab.2022.104624)
Bachelor's Thesis Project
This project was based on the idea that installation of an IED disturbs the ground surface and that these disturbed patches can be detected via machine learning. A dataset was first created for disturbed, undisturbed, and grassy patches of ground. Then features, such as texture and color, were extracted from the dataset and used in a machine learning classifier. The classification algorithm was then applied to a surveillance video recorded via UAV. Image processing and machine learning were done in Python.



Bachelor's Semester Projects
With the objective of creating some automation and convenience at a home, this project was developed using a microcontroller, relays, a Bluetooth module, and some light and motion sensors. The sensors allowed automatic control of lights based on ambient light level and motion in a room. Moreover, an Android app was created to allow the users to control different functions around the home through a smartphone.
This project had two major parts. First, a hand-gesture controlled crane carrier. The hand-gear was composed of an Arduino Micro, an accelerometer, and a RF transmitter module to control and communicate with the carrier that had its own microcontroller and a RF receiver. Second, a crane arm, which was attached to the carrier. The arm was connected to a smartphone via Bluetooth. An Android app and Arduino code guided the arm's movements through servomotors.
The aim of this project was to create a physical model, where traffic lights at a road junction were intelligent enough to save time and other resources of people by controlling the 'red' and 'green' times of traffic lights. It also included a high priority feature for emergency vehicles. These vehicles could wirelessly communicate with the system in advance so they do not have to wait at the junction. A PIC-microcontroller, programmed in assembly language, was used to control the system.